


今天2011年10月23日,在Sepang 賽道舉行的MotoGP 賽事發生了嚴重的事故,義大利車手58 Marco Simoncelli 離開了我們, 令人感到十分哀傷。MOTO7 也希望以此文章來紀念這位參與GP賽事9年,並拿下2008年GP250 世界冠軍的車手。
在事故的影片記錄中,可以看出Simon 的車在後輪失去抓力後,後輪迅速向外側滑,在回復抓地力的過程中,也使的車身角度改變,變成車頭朝向賽道內側。當後輪回復抓地力時,車手卻已經失去平衡,無法控制車身,直接往內衝,撞上Edwards與Rossi。看到這樣的車身動態,讓筆者想起來最近MOTO7 所研究的TC循跡系統主題。首先在汽車車輛動態的討論中,有兩種駕駛不想看到的情形,簡單地說,第一種為前輪失去抓力,稱為Lose Control、失去控制。第二種為後輪失去抓力,稱為Lose Stability、失去穩定性。當前輪失去抓力,方向盤的操作無法控制車輛,因此稱為失去控制。當後輪開始失去抓力,造成甩尾等狀況,雖然有些車手仍能控制車身,但是處於一個穩定性極低的狀態,也可以看成車輛變得很「活潑」,因此稱為失去穩定性。

無論是前輪或是後輪失去抓地力,都有可能會對騎士造成不小的傷害。
若從二輪車的觀點來看,1970年有學者提出行駛時會有三種不穩定的模式:第一種是車身左右偏擺,出現在剛起步,速度很慢的時候,高速時就自然穩定下來。第二種則是車身左右搖擺,在直線底煞車時經常可見,後輪有往前跑的趨勢。第三種則是車頭晃動,也就是安裝防甩頭的理由。當摩托車後輪失去抓力,TC開始介入設法「補救」,利用騎士所不能以油門直接控制的方式:包含調整點火正時、調整供油量、甚至在ride by wire電子油門系統中還可以直接跳過騎士控制節氣門開度,來降低引擎輸出,回復抓力。如此的系統在一般預想到的情形之下,是可以讓後輪恢復抓力。但在極端的情況中,也許車手已經失去對車輛的掌握、也許路面即將改變狀況、或是在系統未有設想到的狀況之下,此時系統介入動力,結果是如何,就很難去預測了。
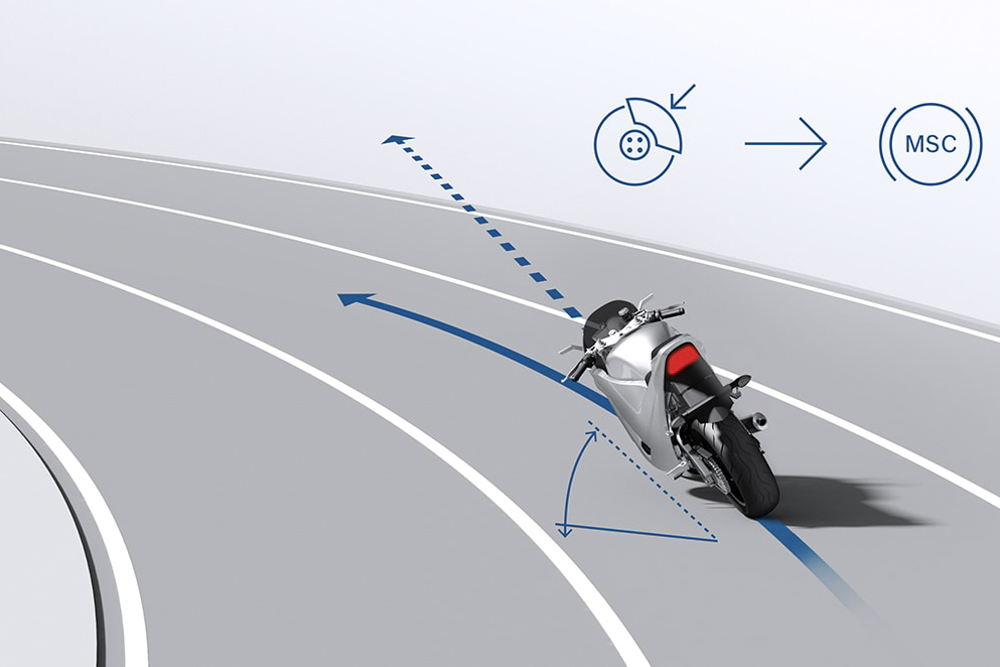
Traction Control循跡系統當道,不過到底是人控制初還是車控制人? (Source:BOSCHE)
比較先前所提到的失去控制、失去穩定性,當電腦開始介入車輛的動力系統,這是否意味著騎士對於車輛的完全控制權已經喪失?雖然系統的出發點是為了防止車輛因失去抓力而失去穩定性,但卻是以讓騎士失去控制的方式來達到目的。在過去GP電子系統還尚未發達的時代,車手可以說為了能增加對車輛的控制,以讓輪胎失去抓力(失去穩定性)的方式來達成。而目前電子系統全面介入的時代,卻是以相反的方式來詮釋對車輛的操控。在汽車上,還有開發汽車主動偵測並煞車的系統,雖然出發點是好的,卻奪去了駕駛的主控權,甚至模糊了究竟誰該為一台車在路上行駛的安全負責。究竟是失去穩定性讓人害怕,還是失去掌控值得擔憂呢?恐怕還沒能有一個答案。

延伸閱讀: TRACTION CONTROL 循跡系統 PART 1
TRACTION CONTROL 循跡系統 PART 2